การใช้งาน GPS โมดูลกับไมโครคอนโทรลเลอร์ NO.1
| |||
การใช้งาน GPS โมดูลกับไมโครคอนโทรลเลอร์
| |||
ลักษณะของข้อมูลที่ได้จาก GPS
| |||
การเขียนโปรแกรมเพื่อวิเคราะห์ข้อมูล
| |||
โมดูลที่ใช้ในการทดสอบการใช้งาน
| |||
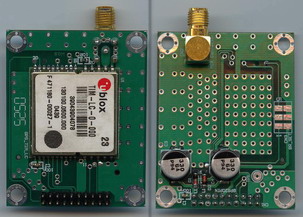 | |||
U-Blox / TIM-LC : เป็นโมดูลที่ใช้ต่อกับไมโครคอนโทรลเลอร์ ได้โดยตรง (หากจะใช้ต่อกับ PC ต้องมีตัวแปลงระดับแรงดันเป็น RS232 อย่างเช่น MAX232 อีกทีหนึ่ง)
| |||
เนื่องจากคอนเน็คเตอร์ของโมดูลมีขนาดเล็ก เพื่อความสะดวกในการทดลอง เราจึงต้องสร้างบอร์ดทดลองดังรูป
| |||
GPS developer board
| |||
 | |||
วงจรของ GPS developer board
| |||
การเชื่อมต่อกับไมโครคอนโทรลเลอร์ PIC
| |||
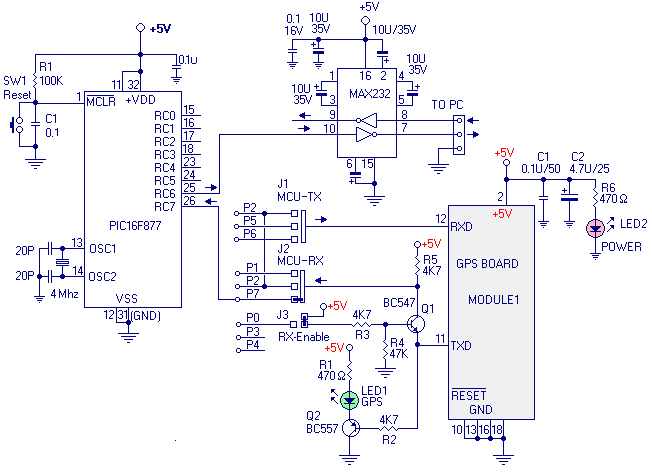 | |||
การต่อ PIC16F877 กับ GPS Developer Board ในการทดสอบเบื้องต้น
| |||
- ในการทดสอบเบื้องต้น เราจะนำ TX ของ GPS ต่อเข้ากับ RX ของ PIC16F877 ที่ขา RC7(PIN26) โดยยังไม่ต่อขา RX ของ GPS มาใช้งาน และนำค่าที่อ่านได้นั้น ส่งออกไปยัง PC เพื่อดูข้อมูลที่รับได้ โดยยังไม่ได้ประมวลผลข้อมูลแต่อย่างใด
| |||
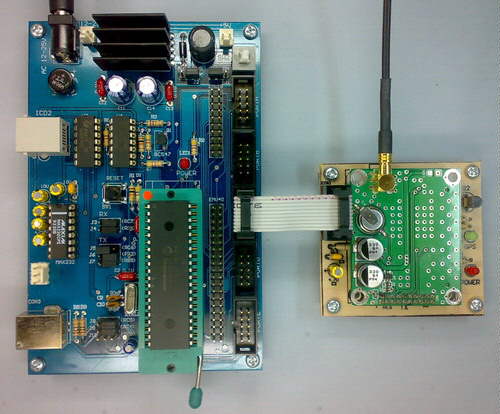 | |||
การใช ้GPS developer board ต่อ เข้ากับ PICDEV40 ที่ PORTC โดยใช้ PIC16F877 ใช้การทดสอบ
| |||
เซ็ตค่าBaud Rate ของ PIC16F877 และ โปรแกรมที่รับค่าจาก พอร์ตอนุกรมบน PC อย่างเช่น Hyperterminal
| |||
เท่ากับ 9600, None Parity ,1 Stop Bits ,Data Bits เป็น 8 bit (ขึ้นอยู่กับการเซ็ทของผู้ผลิต GPS โมดูลตอนให้มา)
| |||
หากเป็นโมูล HOLUX GM-82 ให้เซ็ทเป็น 4800, None Parity ,1 Stop Bits ,Data Bits เป็น 8 bit
| |||
ซึ่ง Baud Rate ของ GPS นี้สามารถเซ็ทใหม่ได้ด้วยคำสั่ง
| |||
ตัวอย่างการเซ็ทค่าใน CCS-C complier
| |||
#use delay(clock=4000000)
#use rs232(baud=9600,parity=N,xmit=PIN_B2,rcv=PIN_B1,bits=8)
| |||
ตัวอย่างโปรแกรม
| |||
| |||
ตัวอย่างข้อมูลที่รับได้จากโปรแกรม Hyperterminal
| |||
| |||
ตัวอย่างข้อมูลที่ได้จาก GPS
| |||
ข้อมูลที่ได้จะเป็นแบบ NMEA (National Marine Electronics Association)
| |||
โดยสามารถดูรายระเอียดได้ที่ http://www.gpsinformation.org/dale/nmea.htm
|

ความคิดเห็น
แสดงความคิดเห็น