หุ่นยนต์เดินตามเส้น 2 เซ็นเซอร์ Arduino NO.11

เซ็นเซอร์แบบนี้จะมีช่วงในการทำงาน หรือ ระยะในการตรวจจับจะได้ใกล้กว่าแบบ Opposed mode ซึ่งในสภาวะการทำงานปกติ พื้นเเป็นสีขาว ตัวรับ Receiver จะสามารถรับสัญญาณแสงจากตัวส่ง Emitter ได้ตลอดเวลา เนื่องจากลำแสง สะท้อนกลับมาได้ จะแสดงค่า เป็น 0

และ เมื่อพื้นเป็นสีดำ แสงสะท้อนกลับมาไม่ได้ จึงทำให้ตัวรับ Receiver ไม่สามารถรับลำแสงที่จะสะท้อนกลับมาได้ จะแสดงค่า เป็น 1

การทำงานของ หุ่นยนต์เดินตามเส้น Arduino


หากเซ็นเซอร์ซ้ายมาพบพื้นสีดำ และ เซ็นเซอร์ขวาพบพื้นสีขาว ( 1 , 0 ) ให้หุ่นยนต์เลี้ยวไปทางด้านซ้าย


หากเซ็นเซอร์ทั้งสองมาอยู่บนเส้นสีดำทั้งคู่ ( 1 , 1 ) ให้หุ่นยนต์หยุด


โดยสรุป มี 4 เงื่อนไขที่ หุ่นยนต์เดินตามเส้น Arduino รับค่าจากเซ็นเซอร์ซ้ายและขวา
คือ (0 ,0) | (0 ,1) | (1 , 0) | (1 ,1 ) แสดงตามตารางด้านล่าง
คือ (0 ,0) | (0 ,1) | (1 , 0) | (1 ,1 ) แสดงตามตารางด้านล่าง
อินพุต
|
เอาต์พุต
|
การเคลื่อนที่ของหุ่นยนต์
| ||||
เซ็นเซอร์ซ้าย
|
เซ็นเซอร์ขวา
|
มอเตอร์ซ้าย
|
มอเตอร์ขวา
| |||
LS
|
RS
|
LM1
|
LM2
|
RM1
|
RM2
| |
0
|
0
|
0
|
0
|
0
|
0
|
เดินหน้า
|
0
|
1
|
1
|
0
|
0
|
0
|
เลี้ยวขวา
|
1
|
0
|
0
|
0
|
1
|
0
| เลี้ยวซ้าย |
1
|
1
|
1
|
0
|
1
|
0
|
หยุด
|
เราจะสร้าง หุ่นยนต์เดินตามเส้น Arduino และ เขียนโปรแกรมตามเงื่อนไขที่แสดงในตารางด้านบน
อุปกรณ์ที่ต้องใช้ก็คือ
1. 2WD Smart Robot Car Chassis Kits
2. Arduino UNO R3 - Made in italy
3. IR Infrared Obstacle Avoidance Sensor Module 2 ชิ้น
4. Motor Drive Module L298N
5. สาย Jumper Female to Male ยาว 20cm.
6. สาย Jumper Male to Male ยาว 20cm.
7. รางถ่านแบบ 18650 ใส่ถ่าน 2 ก้อน
8. แบตเตอรี่ลิเธียม 18650 จำนวน 2 ก้อน
9. เสารองแผ่นพีซีบีโลหะแบบเหลี่ยม 6 mm
10. สกรูหัวกลมน็อตตัวเมีย ขนาด 3มม ยาว12 มม.
11. Mounting Bracket for HC-SR04 Ultrasonic Module แบบสั้น
12. ตัดแผ่นอะคริลิค หนา 3 มิลลิเมตร ขนาด 3 x 10 เซ็นติเมตร
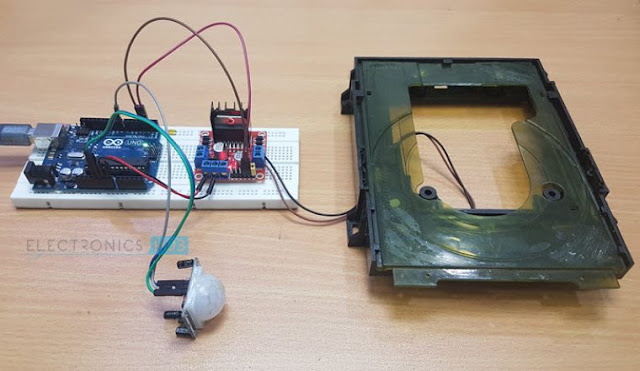
เริ่มต้นด้วยการ ประกอบ Smart Robot Car Chassis Kit

ต่อวงจร Arduino UNO กับ L298N Motor Driver ตามรูปการต่อวงวงจร
นำไฟจากแบตเตอรี่ลิเธียม 18650 ไปต่อตรงกับ L298N Motor Driver (ไม่ต่อกับ พอร์ต Power Supply ของ บอร์ด Arduino UNO R3 ) และ นำไฟ 5 โวลต์ ที่ออกจาก L298N Motor Driver ต่อออกไปเลี้ยง บอร์ด Arduino UNO R3 ตามรูปการต่อวงวงจร



ต่อวงจร Arduino UNO กับ IR Infrared Obstacle Avoidance Sensor ตามรูป

แผ่นอะคริลิค ขนาด 10 x 3 เซ็นติเมตร ประกอบ เข้ากับ เซ็นเซอร์ซ้ายและขวา

ยึดเข้ากับ Mounting Bracket for HC-SR04 Ultrasonic Module แบบสั้น

ยึดเข้ากับ ตัวหุ่นยนต์

เมื่อต่อวงจร หุ่นยนต์เดินตามเส้น เสร็จ ต่อสาย USB จากคอมพิวเตอร์ เข้ากับ Arduino UNO R3 ปรับ ระยะการตรวจจับ โดย เมื่อ เซ็นเซอร์ อยู่ที่พื้นปรกติ ให้ไฟ LED ติด 2 ดวง และ เมื่อ เข้าไปในพื้นที่ สีดำ ให้ ไฟ LED ติด 1 ดวง

ถาพรวมเมื่อต่อเสร็จแล้ว



เปิดโปรแกรม Arduino (IDE) และ Upload โค้ดนี้ ไปยัง บอร์ด Arduino UNO R3
/*-------definning Inputs------*/
int LS = 2; // left sensor
int RS = 3; // right sensor
/*-------definning Outputs------*/
int LM1 = 4; // left motor
int LM2 = 5; // left motor
int RM1 = 6; // right motor
int RM2 = 7; // right motor
/*-------PWM ควบคุมความเร็วมอเตอร์-----*/
int PWM1 = 10; // PWM left motor
int PWM2 = 11; // PWM right motor
int SPEED = 90; // Speed PWM สามารถปรับความเร็วได้ถึง 255
void setup()
{
pinMode(LS, INPUT);
pinMode(RS, INPUT);
pinMode(LM1, OUTPUT);
pinMode(LM2, OUTPUT);
pinMode(RM1, OUTPUT);
pinMode(RM2, OUTPUT);
pinMode(PWM1, OUTPUT);
pinMode(PWM2, OUTPUT);
}
void loop()
{
if (!(digitalRead(LS)) && !(digitalRead(RS))) // Move Forward
{
analogWrite(PWM1, SPEED);
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
analogWrite(PWM2, SPEED);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
if (!(digitalRead(LS)) && digitalRead(RS)) // Turn right
{
digitalWrite(LM1, LOW);
digitalWrite(LM2, LOW);
analogWrite(PWM2, SPEED);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
if (digitalRead(LS) && !(digitalRead(RS))) // turn left
{
analogWrite(PWM1, SPEED);
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, LOW);
digitalWrite(RM2, LOW);
}
if (digitalRead(LS) && digitalRead(RS)) // stop
{
digitalWrite(LM1, LOW);
digitalWrite(LM2, LOW);
digitalWrite(RM1, LOW);
digitalWrite(RM2, LOW);
}
}
ความคิดเห็น
แสดงความคิดเห็น